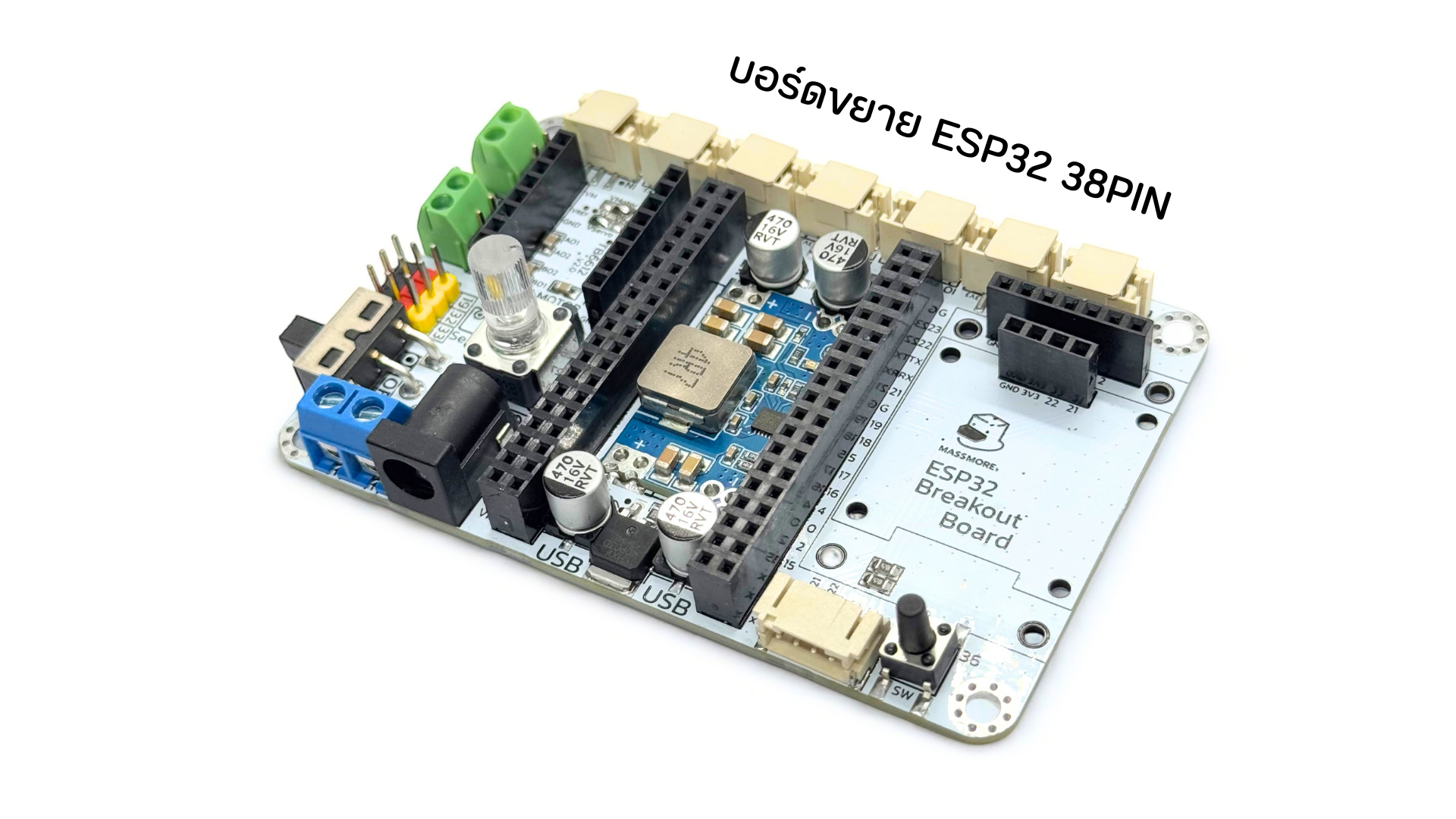
 บอร์ดขยายหุ่นยนต์ ESP32 38PIN Breakout Board จาก Massmore
บอร์ดขยายหุ่นยนต์ ESP32 38PIN Breakout Board จาก Massmore
บอร์ดทดลองอัจฉริยะ เพื่อสร้างหุ่นยนต์และ IoT อย่างมืออาชีพ
พบกับ ESP32 Breakout Board ที่ออกแบบโดยทีมวิศวกรของ Massmore เพื่อยกระดับการเรียนรู้และการพัฒนาโปรเจกต์หุ่นยนต์ Arduino ให้ใช้งานง่าย ครบ จบในบอร์ดเดียว!
 จุดเด่นที่คุณห้ามพลาด:
จุดเด่นที่คุณห้ามพลาด:
 รองรับ ESP32 (38 PIN) พร้อมใช้งานทันที เสียบได้พอดี!
รองรับ ESP32 (38 PIN) พร้อมใช้งานทันที เสียบได้พอดี! DC IN (6–12V) พร้อมวงจร Step Down แปลงไฟให้เสถียรที่ 5V 5A เพื่อจ่ายไฟให้ทั้งระบบ
DC IN (6–12V) พร้อมวงจร Step Down แปลงไฟให้เสถียรที่ 5V 5A เพื่อจ่ายไฟให้ทั้งระบบ Driver มอเตอร์ รองรับ TB6612FNG หรือ Compatible
Driver มอเตอร์ รองรับ TB6612FNG หรือ Compatible DC Motor 2 ช่อง (2CH)
Servo Motor 3 ช่อง (3CH)
 สวิตช์ ON-OFF ควบคุมไฟเลี้ยงสะดวกปลอดภัย
สวิตช์ ON-OFF ควบคุมไฟเลี้ยงสะดวกปลอดภัย ตัวต้านทานปรับค่าได้ (VR) สำหรับงานควบคุมที่ต้องการความแม่นยำ
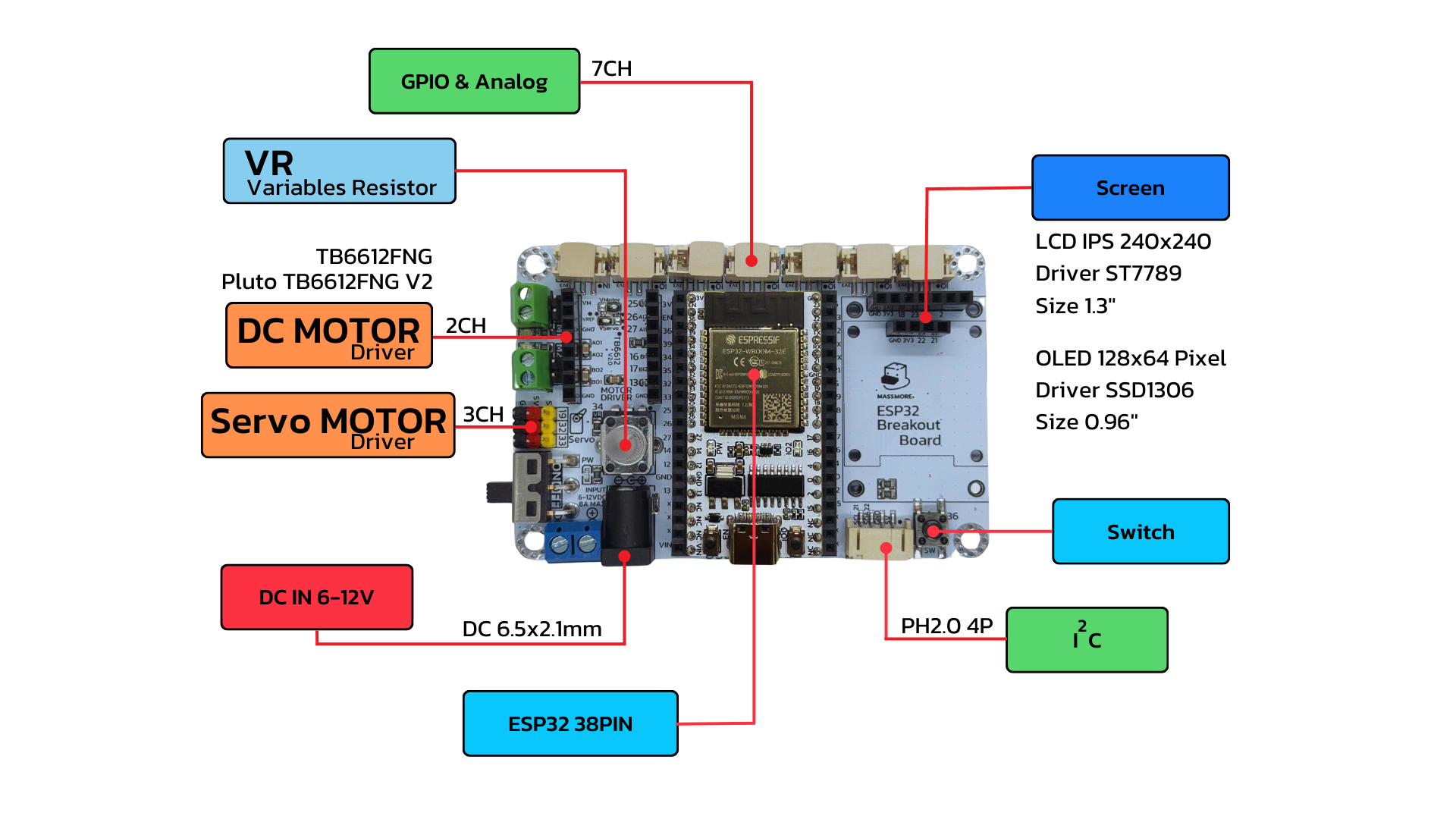
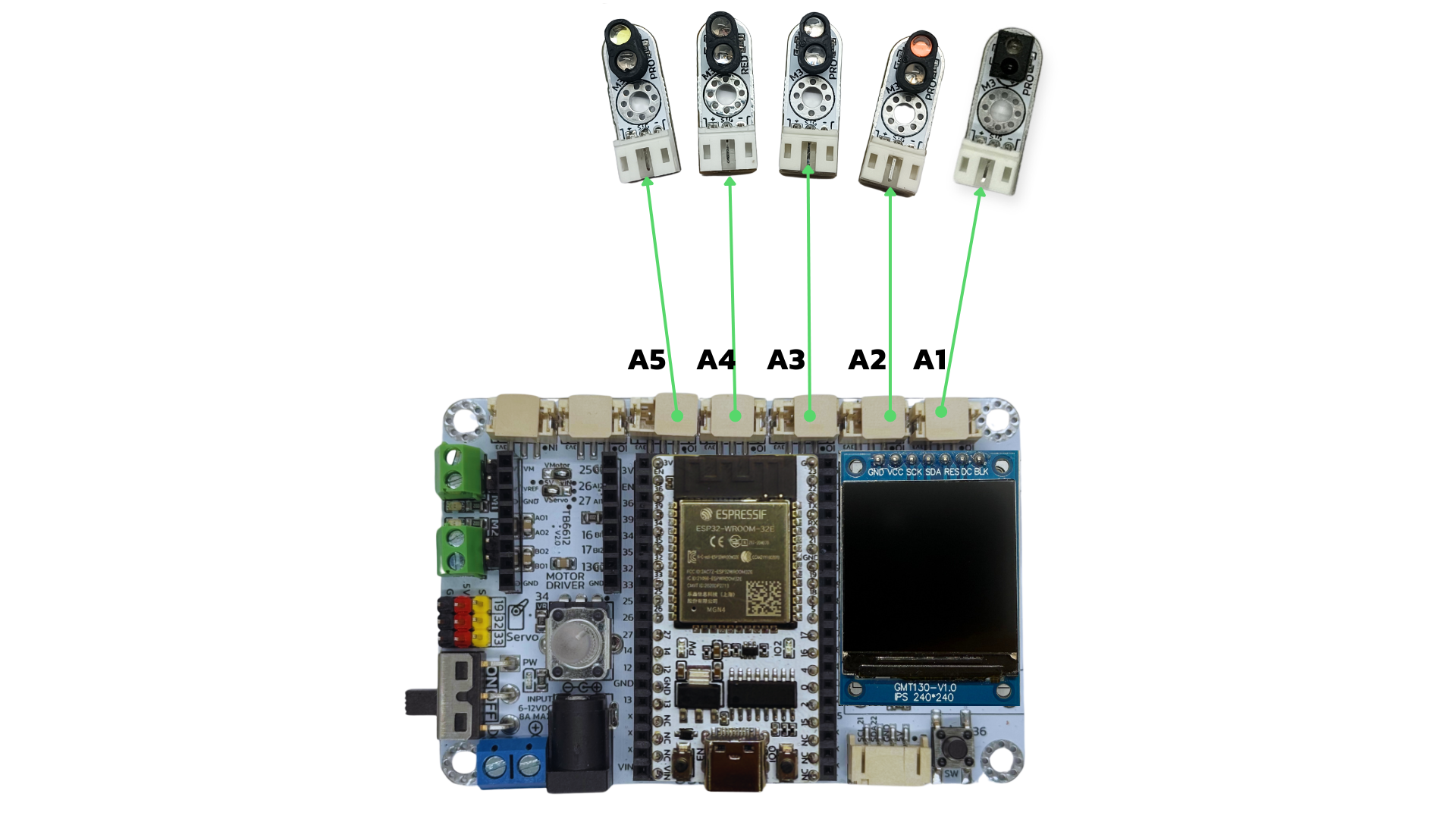
ตัวต้านทานปรับค่าได้ (VR) สำหรับงานควบคุมที่ต้องการความแม่นยำ GPIO พอร์ตเต็ม พร้อมใช้งานกับเซ็นเซอร์และอุปกรณ์เสริม
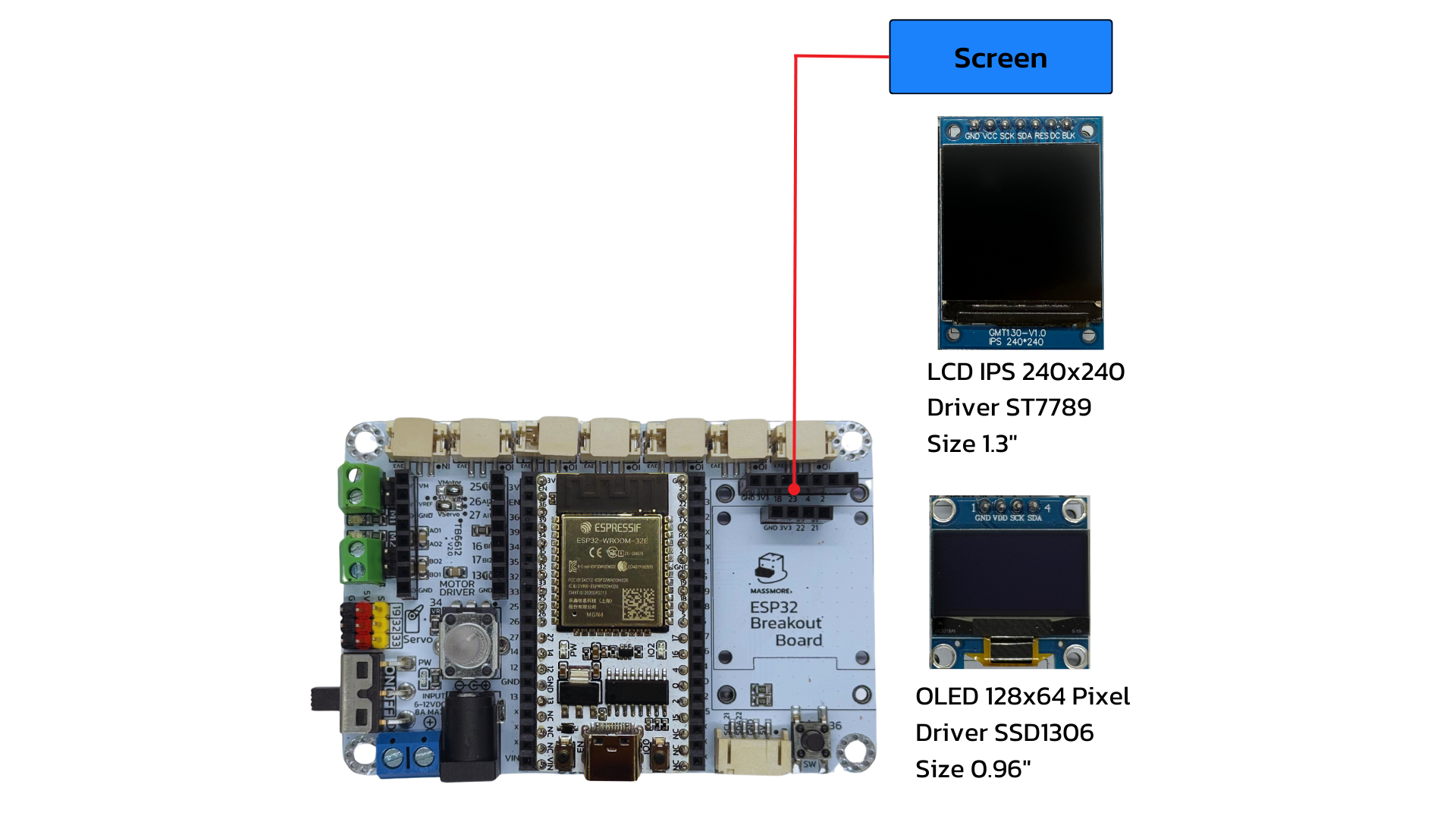
GPIO พอร์ตเต็ม พร้อมใช้งานกับเซ็นเซอร์และอุปกรณ์เสริม พอร์ตจอแสดงผล (SCREEN) สำหรับต่อ OLED, LCD ฯลฯ
พอร์ตจอแสดงผล (SCREEN) สำหรับต่อ OLED, LCD ฯลฯ- I²C Interface (PH2.0 4P) รองรับการเชื่อมต่อเซ็นเซอร์และโมดูลต่างๆ ผ่าน I2C ได้อย่างง่ายดาย
 Switch พร้อมใช้งาน ติดตั้งง่าย ใช้ทดสอบโปรแกรมได้ทันที
Switch พร้อมใช้งาน ติดตั้งง่าย ใช้ทดสอบโปรแกรมได้ทันที
 เหมาะสำหรับใคร?
เหมาะสำหรับใคร?
นักเรียน นักศึกษา ที่ต้องการ ชุดฝึกทดลอง Arduino / ESP32
Maker และผู้พัฒนา IoT ที่ต้องการบอร์ดขยายคุณภาพสูง
ผู้สอน STEM / Robotics ที่อยากให้การเรียนรู้สนุกและครอบคลุม
 ใช้ได้กับ:
ใช้ได้กับ:
หุ่นยนต์เดินตามเส้น / หุ่นยนต์เลี้ยวซ้ายขวา
ระบบสมาร์ทโฮม / สมาร์ทฟาร์ม
โปรเจกต์ IoT ทั่วไปที่ต้องการความเสถียรและง่ายในการต่อวงจร
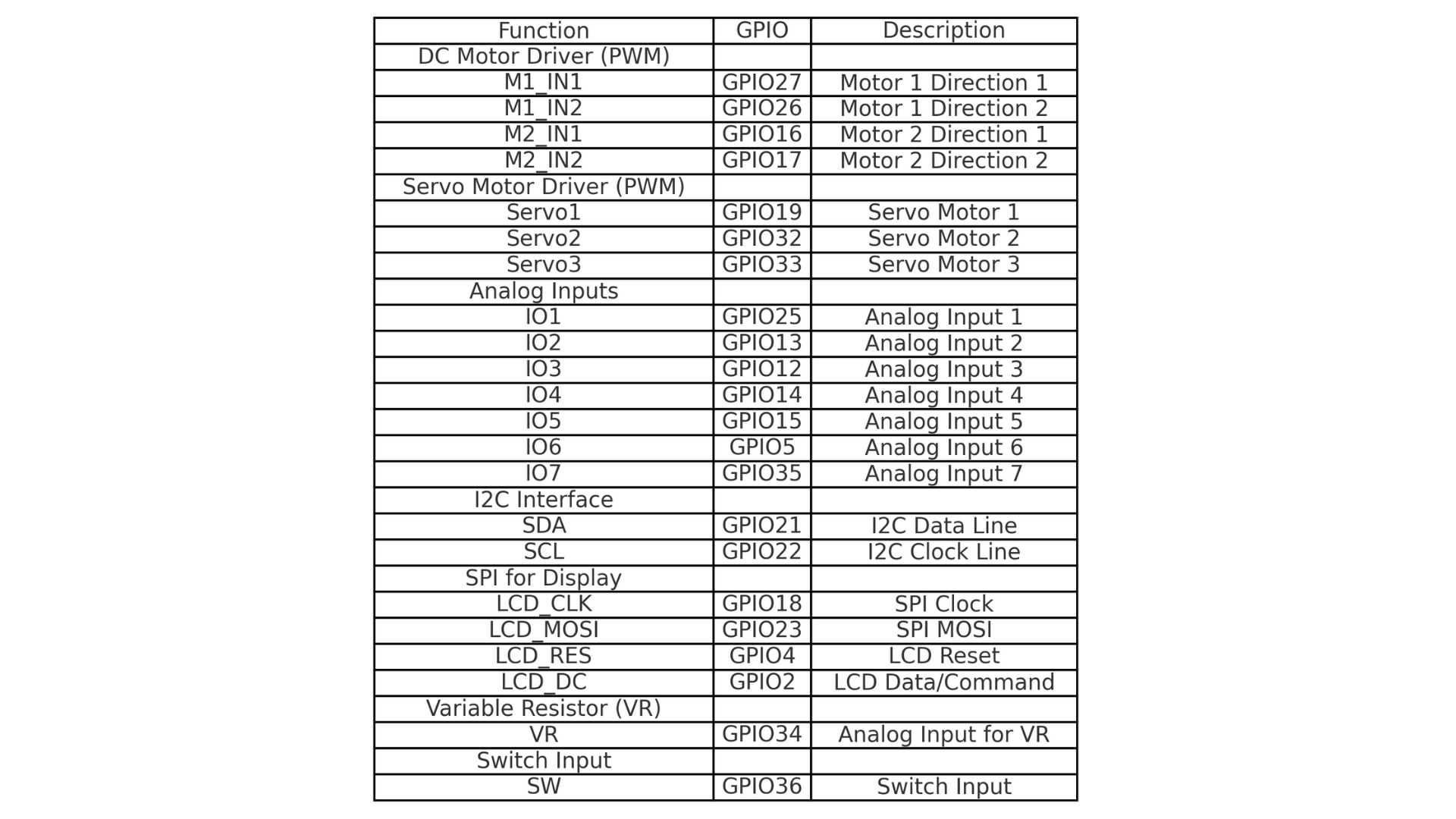
 GPIO
GPIO
พอร์ตขยายขา GPIO (General Purpose Input/Output) ของ ESP32 แบบครบทุกพิน
ใช้ต่อกับอุปกรณ์ภายนอก เช่น LED, เซ็นเซอร์, รีเลย์, ปุ่มกด ฯลฯ
รองรับทั้งโหมด Input และ Output
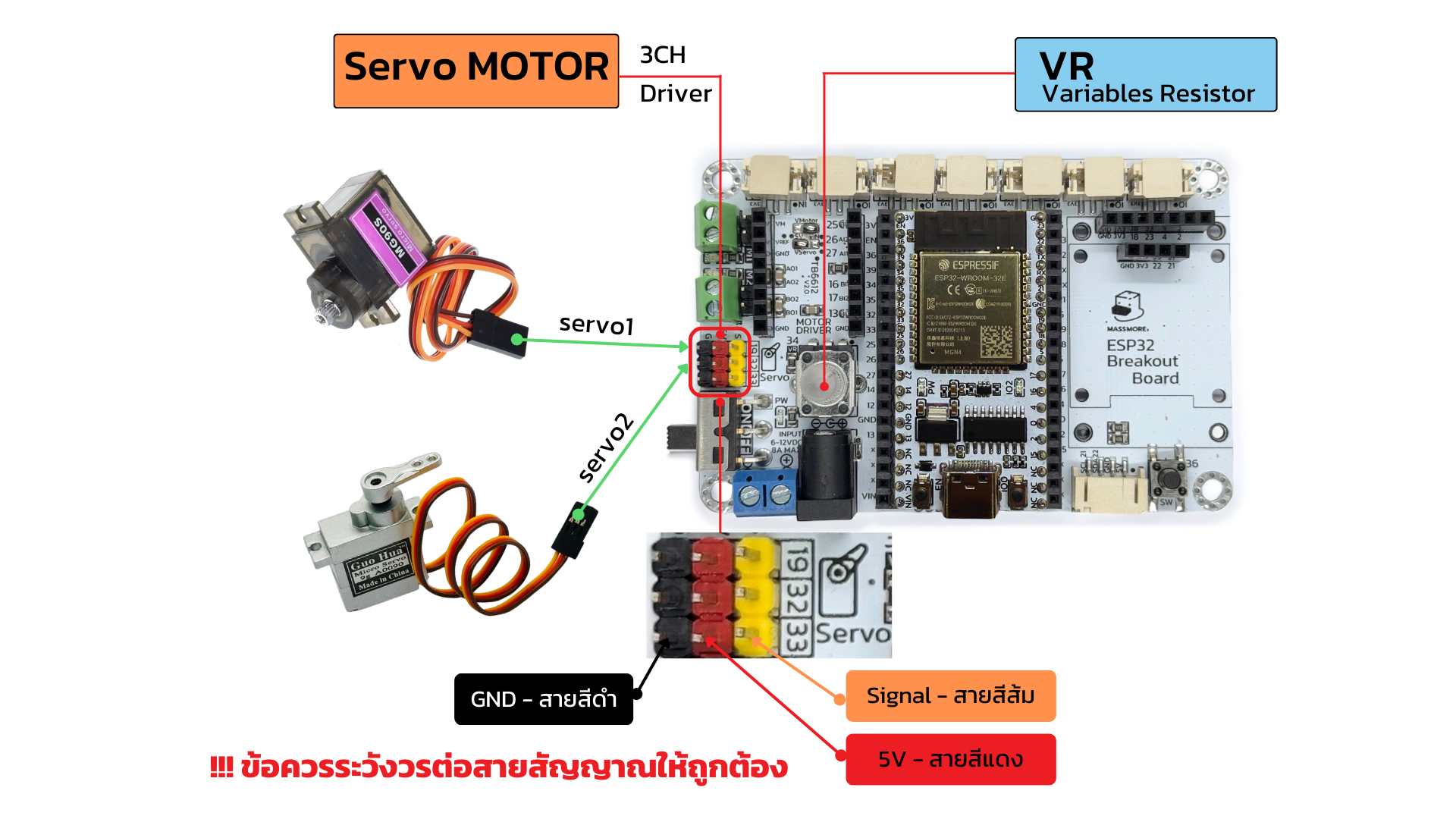
 VR (Variable Resistor)
VR (Variable Resistor)
ตัวต้านทานปรับค่าได้
ใช้สำหรับทดลองหรืออ่านค่าจาก Potentiometer
เหมาะกับงานควบคุม เช่น ปรับความสว่าง, ควบคุมความเร็วมอเตอร์ หรือสร้างสัญญาณ Analog
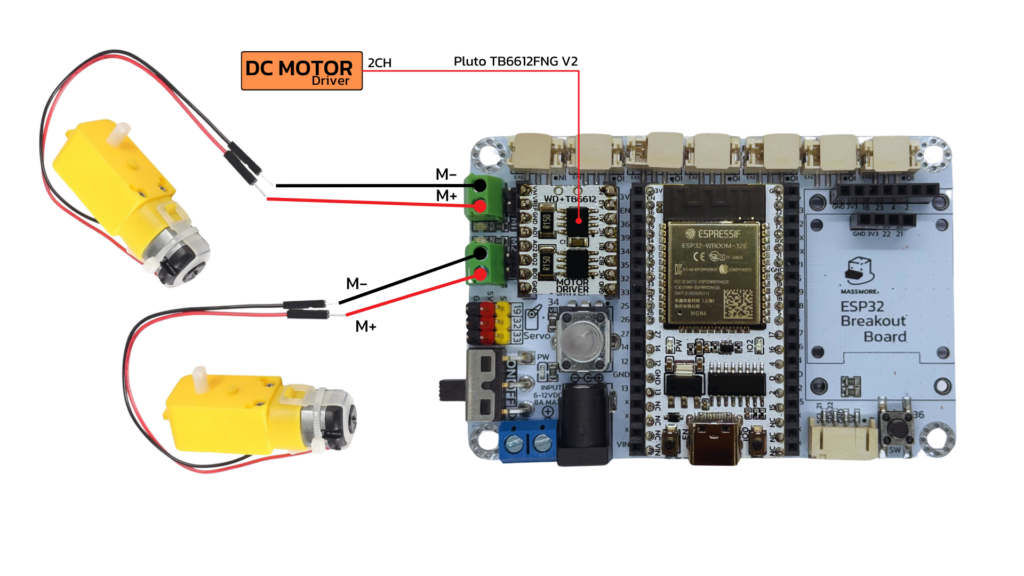
 DC Motor Driver (2CH)
DC Motor Driver (2CH)
ช่องต่อมอเตอร์กระแสตรง 2 ตัว
รองรับ TB6612FNG หรือ Compatible
รองรับการควบคุมทิศทางหมุน และความเร็วของมอเตอร์
Servo Motor Driver (3CH)
ช่องต่อเซอร์โวมอเตอร์ 3 ช่อง
ขั้วต่อแบบ JST พร้อมไฟเลี้ยงและสัญญาณ
ใช้ควบคุมมอเตอร์เซอร์โวในการหมุนตามองศาที่ต้องการ
 ON-OFF Switch
ON-OFF Switch
สวิตช์ตัดต่อไฟหลักจาก DC IN
ใช้งานสะดวก ปลอดภัย ไม่ต้องถอดปลั๊กบ่อย
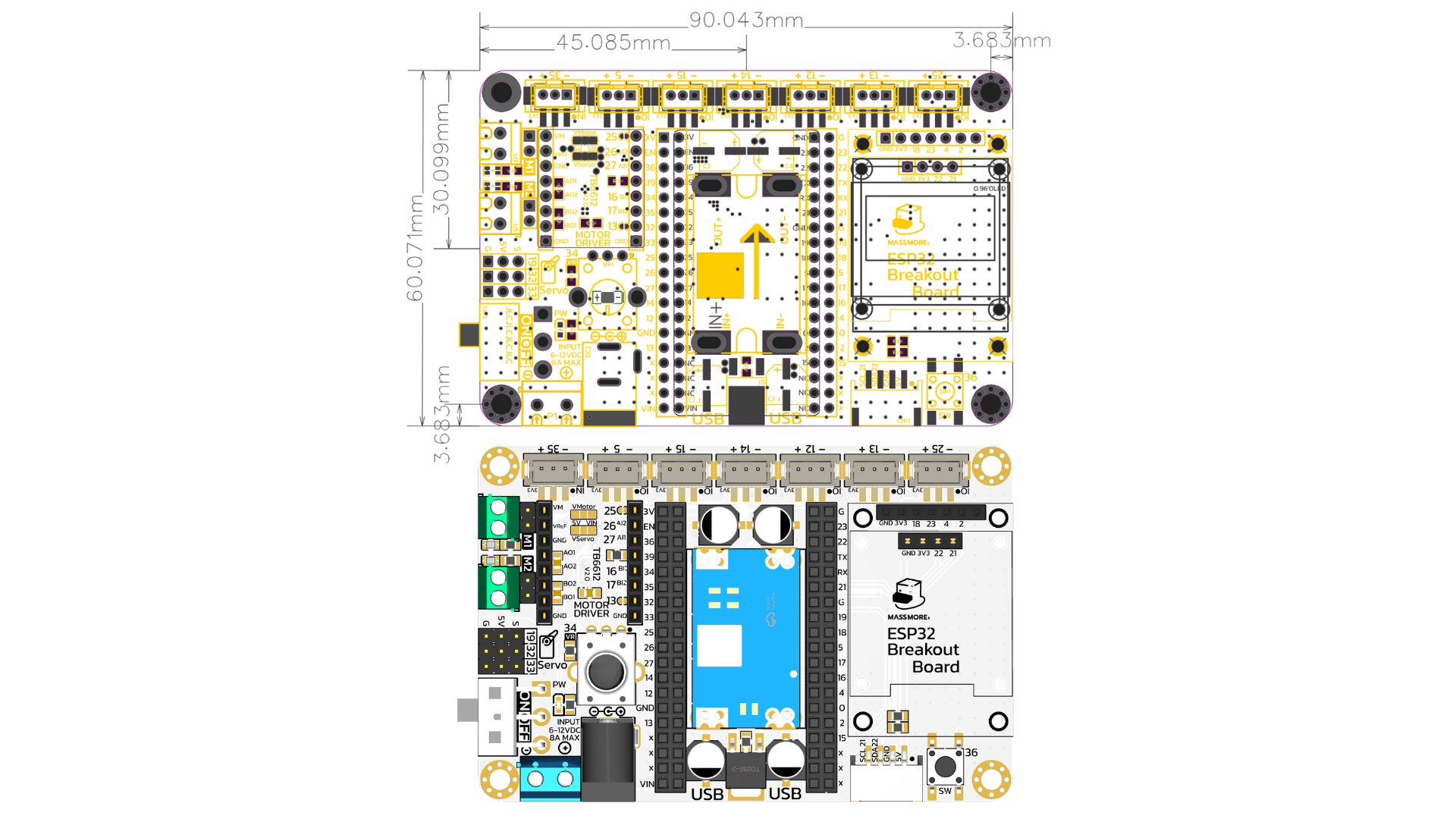
DC IN (6–12V)
แจ็คขนาด 6.5×2.1mm สำหรับรับไฟเลี้ยงจากอะแดปเตอร์
รองรับแรงดันอินพุต 6–12V
ป้อนพลังงานให้กับบอร์ดและอุปกรณ์ทั้งหมด
 STEP Down (6–12V to 5V5A)
STEP Down (6–12V to 5V5A)
วงจรแปลงแรงดันจาก DC IN (6–12V) ลงเป็น 5V 5A
ใช้เลี้ยง ESP32 และอุปกรณ์อื่นอย่างเสถียร
จ่ายกระแสสูงเพียงพอสำหรับมอเตอร์และเซอร์โว
SCREEN (OLED/LCD)
พอร์ตสำหรับต่อจอแสดงผล เช่น OLED, LCD
ช่วยให้แสดงค่าข้อมูลต่าง ๆ ได้สะดวก
Switch (ปุ่มกด)
ปุ่มกดใช้งานได้ทันที เหมาะกับการทดสอบโปรแกรม
ใช้เป็นปุ่มควบคุมหุ่นยนต์หรือฟังก์ชันอื่น ๆ
I²C (PH2.0 4P)
พอร์ตสำหรับอุปกรณ์ที่ใช้โปรโตคอล I²C เช่น เซ็นเซอร์วัดอุณหภูมิ, จอ OLED, RTC ฯลฯ
ขั้วต่อแบบ PH2.0 4 พิน: VCC, GND, SDA, SCL
 หมายเหตุ:
หมายเหตุ:
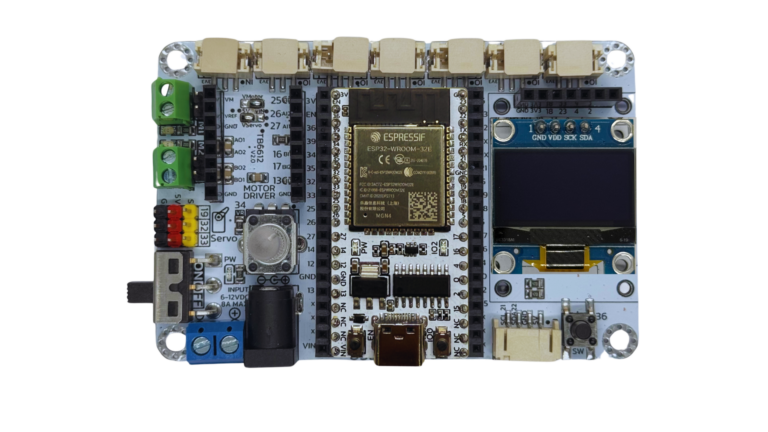
ตรงกลางคือช่องเสียบ ESP32 (38 PIN) ซึ่งเป็น MCU หลักของบอร์ด โดยบอร์ดนี้ออกแบบมาให้พร้อมใช้งานกับ ESP32 ได้ทันที โดยไม่ต้องต่อวงจรซับซ้อนเพิ่มเติม
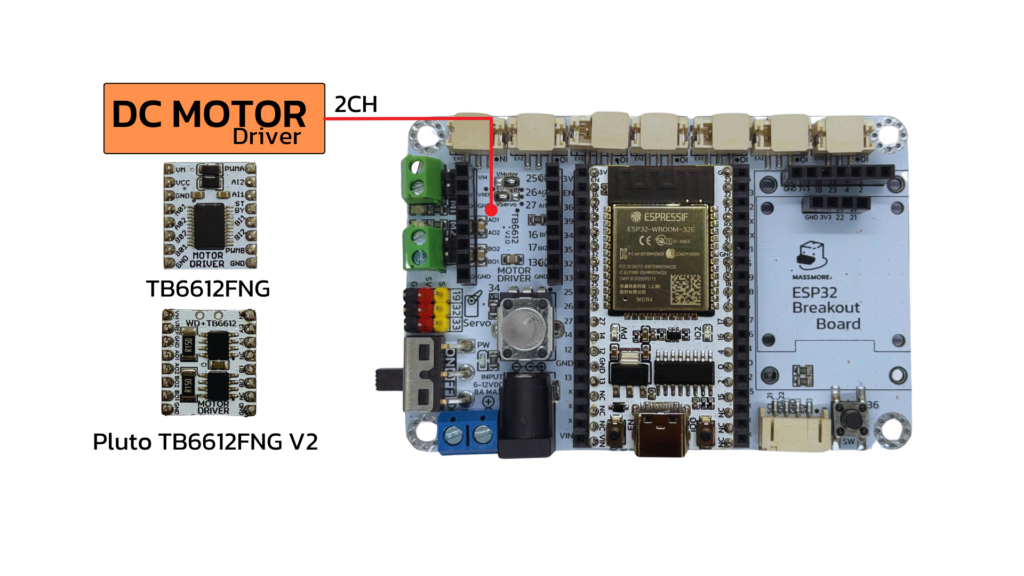
1. TB6612FNG – รุ่นยอดนิยม ใช้งานง่าย
| รายการ | รายละเอียด |
|---|---|
| โหมดควบคุม | PWM 2 ขา (PWMA, PWMB) + IN1, IN2 (4 ขา) |
| จำนวนมอเตอร์ | ขับได้ 2 ตัว (2CH) |
| แรงดันใช้งาน | 2.5V – 13.5V |
| กระแสสูงสุดต่อช่อง | 1.2A (สูงสุด 3.2A burst) |
| พินควบคุม | AIN1, AIN2, BIN1, BIN2 + PWMA, PWMB |
| เหมาะกับ | รถบังคับ, หุ่นยนต์ 2 ล้อ, โปรแกรมง่าย |
ข้อดี:
ใช้งานง่าย เหมาะสำหรับผู้เริ่มต้น
ใช้พิน PWM ควบคุมเพียง 2 ขา
มีวงจรเบรกในตัว
2. TB67H450FNG (Pluto) – พลังสูง ทนทาน
| รายการ | รายละเอียด |
|---|---|
| โหมดควบคุม | PWM แยก 4 ขา (PWM1, PWM2, PWM3, PWM4) |
| จำนวนมอเตอร์ | ขับได้ 2 ตัว (2CH) |
| แรงดันใช้งาน | 4.5V – 28V |
| กระแสสูงสุด | 3.5A (สูงสุดถึง 5A burst) |
| พินควบคุม | IN1, IN2, IN3, IN4 |
| เหมาะกับ | มอเตอร์ใหญ่, หุ่นยนต์รับน้ำหนัก, แข่งขันหุ่นยนต์ |
ข้อดี:
ทนกระแสสูง เหมาะกับมอเตอร์กินกระแสหนัก
มีระบบป้องกันกระแสเกิน / ความร้อน
ขับมอเตอร์ได้ลื่นแม่นยำ ควบคุมแรงบิดได้ดี
- ใช้พินควบคุมน้อย

Development Board - บอร์ดพัฒนา
บอร์ด ESP32 38PIN ชิพแท้จาก Espressif Node32s ESP32S USB Type-C Massmore
 บอร์ด ESP32 38PIN ชิพแท้จาก E...
บอร์ด ESP32 38PIN ชิพแท้จาก E... ฿350.00

Development Board - บอร์ดพัฒนา
บอร์ดขยาย หุ่นยนต์ Robot ESP32 38PIN Breakout Board บอร์ดทดลอง Prototype ชุดฝึก Arduino Massmore
 ชื่อสินค้า: บอร์ดขยาย หุ่นยนต...
ชื่อสินค้า: บอร์ดขยาย หุ่นยนต... ฿590.00

Robotics - หุ่นยนต์
เซ็นเซอร์จับเส้น Sensor Line Follower เซ็นเซอร์หุ่นยนต์วิ่งตามเส้น Phototransistor รุ่น Ruby
เซ็นเซอร์หุ่นยนต์วิ่งตามเส้น ... ฿49.00

Displays - หน้าจอ
โมดูลหน้าจอ OLED ขนาด 0.91 0.96 นิ้ว I2C Display Module Driver SSD1306 12864 128x64 Pixel
ชื่อสินค้า: โมดูลแสดงผล OLED ...